|
Michael Munje Hi there! I am a PhD student at UT Austin where I'm grateful to be advised by Peter Stone within the Learning Agent Research Group (LARG). I'm fortunate to be a receipient of the GEM PhD fellowship. I'm interested in reinforcement learning and its applications to robotics. I finished my M.S. in Computer Science at Georgia Tech with a specialization in Machine Learning where I had the pleasure of collaborating with Matthew Gombolay working on Human-AI collaboration and was a recipient of the GEM MS fellowship. I completed my B.S. in Computer Science at California State University Northridge. I interned previously for the ML group at NASA JPL where I worked on the automatic detection of Martian impact craters. I also interned for Microsoft three times where I optimized advertisement systems. I interned for the ML group at Riverside Research twice where I worked on robot manipulation tasks and RL. I also interned for IBM Research where I worked on quantization for large language models. Outside of research I enjoy playing guitar, running, and playing video games.See my CV for more info. michaelmunje [at] utexas [dot] edu / CV / Bio / Google Scholar / Github |

|
ResearchI am interested in human-centric autonomous agents and robots that can solve complex sequential decision-making tasks. As such, my work draws in elements from machine learning (ML), reinforcement learning (RL), computer vision, and robotics. My long-term research goal is to enable human-centric robot autonomy in everyday human life. |
|
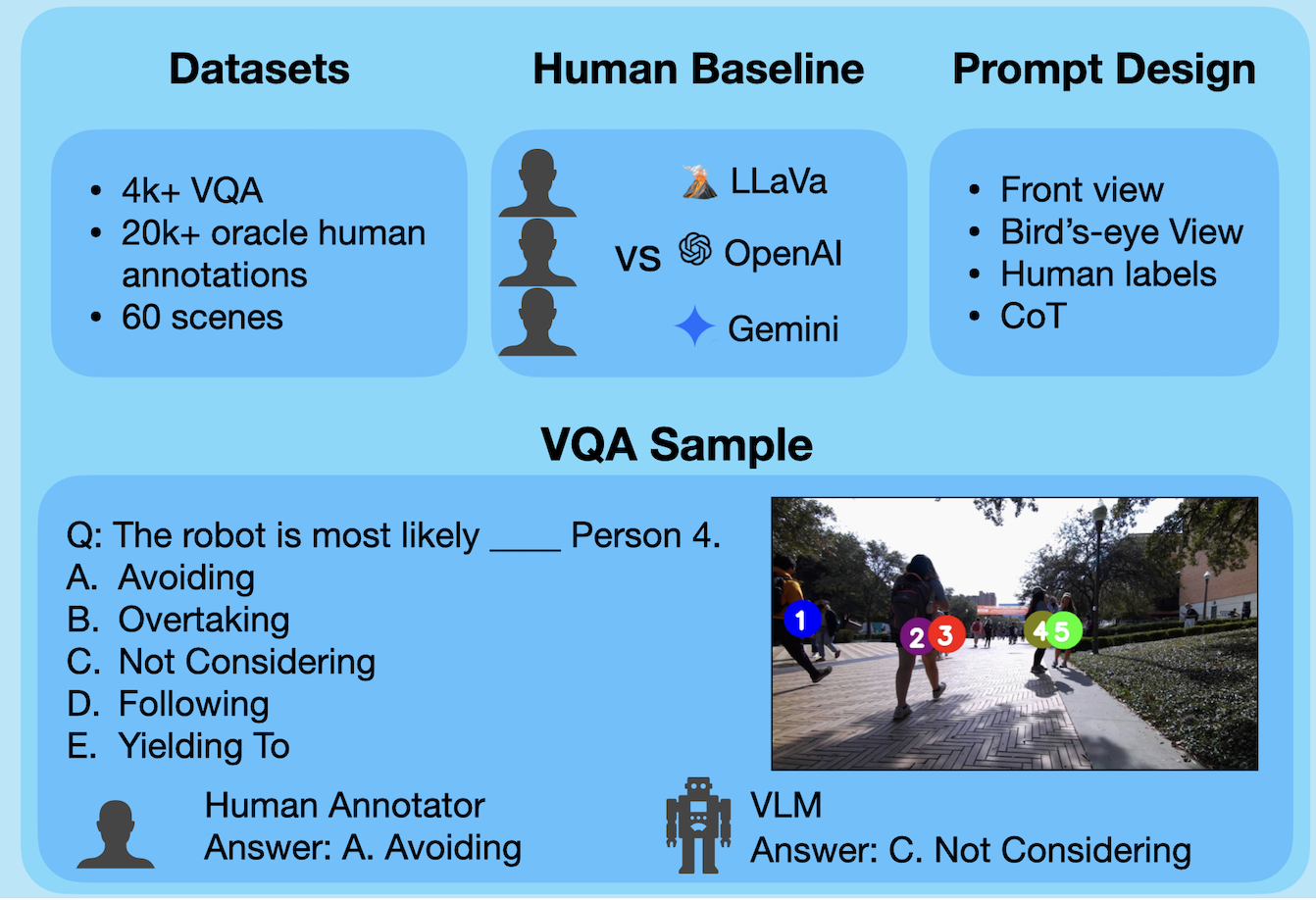
SocialNav-SUB: Benchmarking VLMs for Scene Understanding in Social Robot Navigation
Michael J. Munje, Chen Tang, Shuijing Liu, Zichao Hu, Yifeng Zhu, Jiaxun Cui, Garrett Warnell, Joydeep Biswas, Peter Stone Conference on Robot Learning (CoRL) 2025, Acceptance Rate: 35.77% bibtex We introduce SocialNav-SUB, a VQA dataset and benchmark for evaluating VLMs’ spatial, spatiotemporal, and social reasoning in real-world robot navigation scenes. Across state-of-the-art models, the best system reaches encouraging agreement with human answers yet still lags simple rule-based and human-consensus baselines—highlighting remaining gaps in social scene understanding. |
|
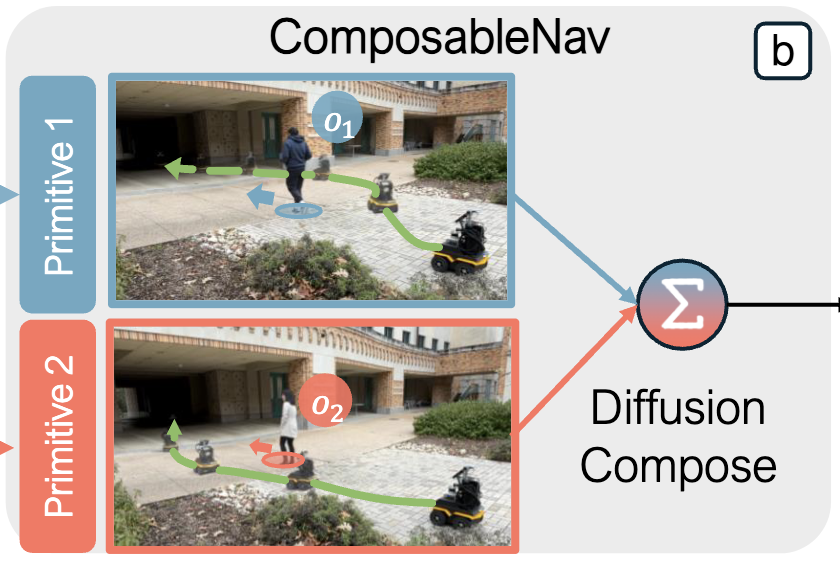
ComposableNav: Instruction-Following Navigation in Dynamic Environments via Composable Diffusion
Zichao Hu, Chen Tang, Michael Munje, Yifeng Zhu, Alex Liu, Shuijing Liu, Garrett Warnell, Peter Stone, Joydeep Biswas Conference on Robot Learning (CoRL) 2025, Acceptance Rate: 35.77% bibtex Introduces ComposableNav, a diffusion-policy approach that learns motion primitives separately and composes them at deployment to follow multi-spec instructions (e.g., “overtake while stay right”). A two-stage pipeline—supervised pretraining then RL fine-tuning—enables specification-specific primitives without per-primitive demos, outperforming non-compositional VLM policies and costmap-composing baselines in simulation and real-world tests. |
|
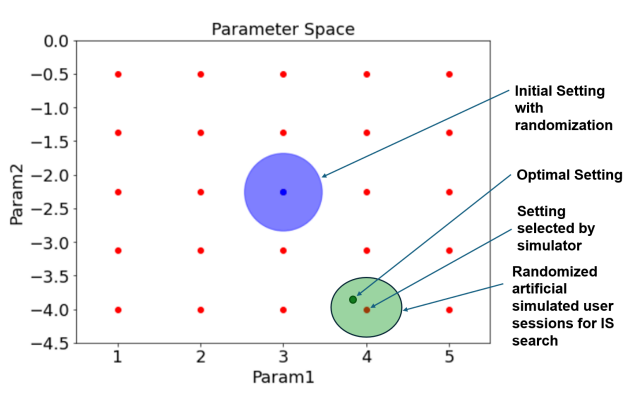
Combining Open-box Simulation and Importance Sampling for Tuning Large-Scale Recommenders
Kaushal Paneri, Michael Munje, Kailash Singh Maurya, Adith Swaminathan, Yifan Shi Preprint, 2024 RecSys Workshop: CONSEQUENCES bibtex Introduced Simulator-Guided Importance Sampling (SGIS), a hybrid method for tuning large-scale ad recommendation systems, improving KPI accuracy and fluency with reduced computational costs compared to traditional methods. |
|
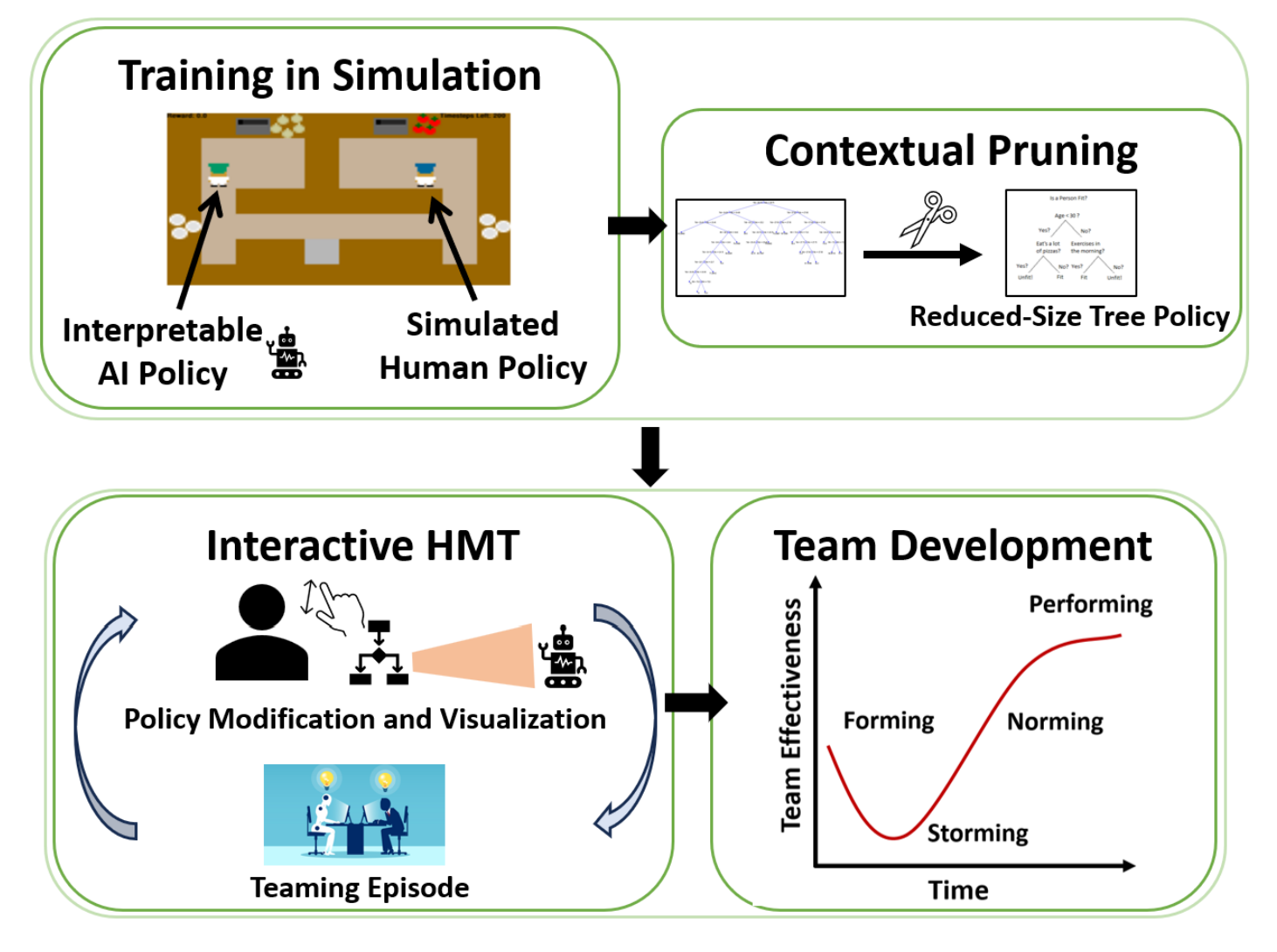
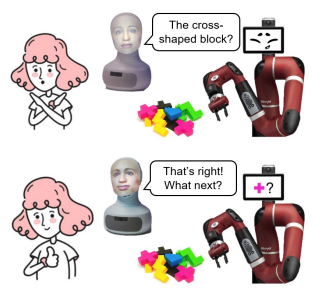
Designs for Enabling Collaboration in Human-Machine Teaming via Interactive and Explainable Systems
Rohan Paleja, Michael Munje, Kimberlee Chang, Reed Jensen, Matthew Gombolay NeurIPS 2024, Acceptance Rate: 25.8% bibtex Introduced interactive interpetable platform for AI policy learning in human-AI coordination tasks, resulting in more fluent teamwork compared to blackbox approaches. |
|
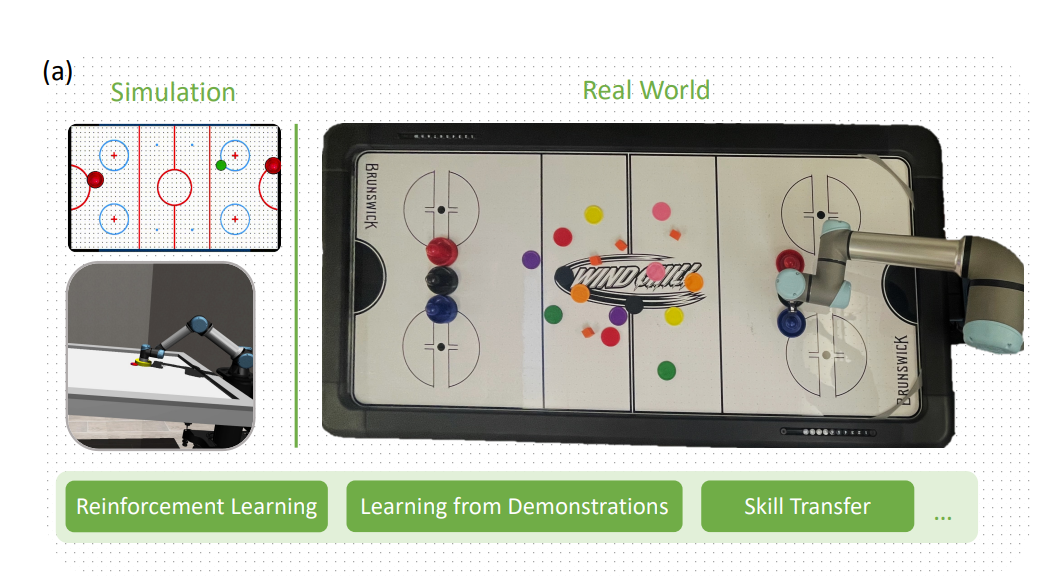
Robot Air Hockey: A Manipulation Testbed for Robot Learning with Reinforcement Learning
Caleb Chuck, Carl Qi, Michael J. Munje, Shuozhe Li, Max Rudolph, Chang Shi, Siddhant Agarwal, Harshit Sikchi, Abhinav Peri, Sarthak Dayal, Evan Kuo, Kavan Mehta, Anthony Wang, Peter Stone, Amy Zhang, Scott Niekum ICRA Workshop: Agile Robotics: From Perception to Dynamic Action, 2024 ICRA WOrkshop: A Future Roadmap for Sensorimotor Skill Learning for Robot Manipulation, 2024 bibtex Robot air hockey as a testbed for reinforcement learning for robotics, including multiple simulations of increasing fidelity. |
|
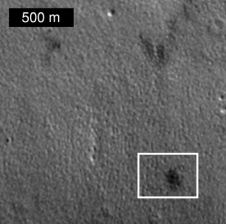
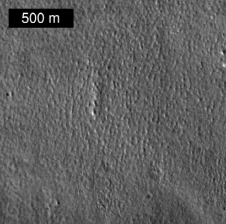
Using machine learning to reduce observational biases when detecting new impacts on Mars
Kiri L. Wagstaff, Ingrid J. Daubar, Gary Doran, Michael J. Munje, Valentin T. Bickel, Annabelle Gao, Joe Pate, Daniel Wexler Icarus, 2022 bibtex Trained a model for detecting new impact craters and deployed across the nearly the entire surface of Mars. Resulted in the finding of many previously unknown new impact craters. |
|
TEAM3 Challenge: Tasks for Multi-Human and Multi-Robot Collaboration with Voice and Gestures
Michael J. Munje, Lylybell K. Teran, Bradon Thymes, Joseph P. Salisbury HRI Late-Breaking Reports, 2023 bibtex Proposed new challenge for multi-agent collaboration between humans and robots. |
|
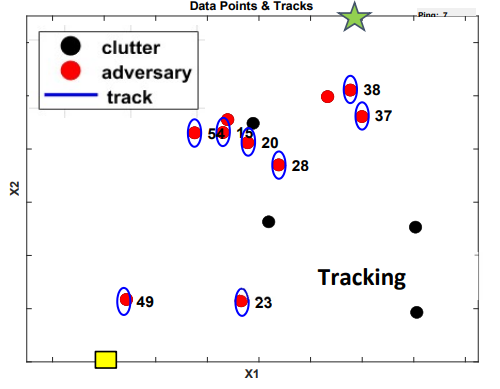
Providing predictions of adversary movements in a gridworld environment to a human-machine team improves teaming performance
Jeffry A. Coady, Paul Dysart, Aidan Schumann, Stephan A. Koehler, Michael J. Munje, William D. Casebeer, David M. Huberdeau SPIE Defense + Commercial Sensing, 2023 bibtex Theory of mind predictive modeling in an adversary-avoidance game improves human-machine fluency. |
|
This template was forked from Jon Barron's website. |